Geometric Deep Reinforcement Learning for Dynamic DAG Scheduling
Abstract
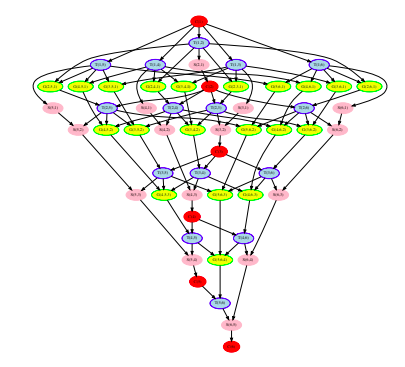
In practice, it is quite common to face combinatorial optimization problems which contain uncertainty along with non-determinism and dynamicity. These three properties call for appropriate algorithms; reinforcement learning (RL) is dealing with them in a very natural way. Today, despite some efforts, most real-life combinatorial optimization problems remain out of the reach of reinforcement learning algorithms. In this paper, we propose a reinforcement learning approach to solve a realistic scheduling problem, and apply it to an algorithm commonly executed in the high performance computing community, the Cholesky factorization. On the contrary to static scheduling, where tasks are assigned to processors in a predetermined ordering before the beginning of the parallel execution, our method is dynamic: task allocations and their execution ordering are decided at runtime, based on the system state and unexpected events, which allows much more flexibility. To do so, our algorithm uses graph neural networks in combination with an actor-critic algorithm (A2C) to build an adaptive representation of the problem on the fly. We show that this approach is competitive with state-of-the-art heuristics used in high-performance computing runtime systems. Moreover, our algorithm does not require an explicit model of the environment, but we demonstrate that extra knowledge can easily be incorporated and improves performance. We also exhibit key properties provided by this RL approach, and study its transfer abilities to other instances.